Examples¶
Tip
The following examples can be downloaded from the eduROV examples folder.
Minimal working code¶
This is a bare minimum example so that the image stream and nothing more can be seen in the browser. A great starting point if you want to expand the functionality yourself.
from os import path
from edurov import WebMethod
web_method = WebMethod(
index_file=path.join(path.dirname(__file__), 'index.html')
)
web_method.serve()
<!DOCTYPE html>
<html>
<head>
<title>Minimal</title>
</head>
<body>
<img src="stream.mjpg" style="transform:rotate(180deg)">
<a href="stop">Stop Server</a>
</body>
</html>
project
├── minimal.py
└── index.html
Features¶
An example created to explain most of the features in the edurov package. See the Getting started page in the official documentation for a full walkthrough.
import os
import subprocess
import Pyro4
from edurov import WebMethod
def my_response(not_used, path):
"""Will be called by the web server if it not able to process by itself"""
if path.startswith('/cpu_temp'):
cmds = ['/opt/vc/bin/vcgencmd', 'measure_temp']
return subprocess.check_output(cmds).decode()
else:
return None
def control_motors():
"""Will be started in parallel by the WebMethod class"""
with Pyro4.Proxy("PYRONAME:KeyManager") as keys:
with Pyro4.Proxy("PYRONAME:ROVSyncer") as rov:
while rov.run:
if keys.state('K_UP'):
print('Forward')
elif keys.state('K_DOWN'):
print('Backward')
elif keys.state('K_RIGHT'):
print('Right')
elif keys.state('K_LEFT'):
print('left')
# Create the WebMethod class
web_method = WebMethod(
index_file=os.path.join(os.path.dirname(__file__), 'index.html'),
runtime_functions=control_motors,
custom_response=my_response
)
# Start serving the web page, blocks the program after this point
web_method.serve()
<!DOCTYPE html>
<html>
<head>
<title>Features</title>
<link rel="stylesheet" type="text/css" href="./static/style.css">
<script src="./static/keys.js"></script>
<script src="./static/extra.js"></script>
</head>
<body>
<main>
<h2>Welcome to the features example</h2>
<img src="stream.mjpg">
<p>
<a href="stop">Stop server</a>
<button onclick="cpuTemp()">Display CPU temp</button>
</p>
<p>
Use arrow keys to print statements in the terminal window.
</p>
</main>
</body>
</html>
project
├── features.py
├── index.html
└── static
├── keys.js
├── extra.js
└── style.css
Wireless RC car with camera feed¶
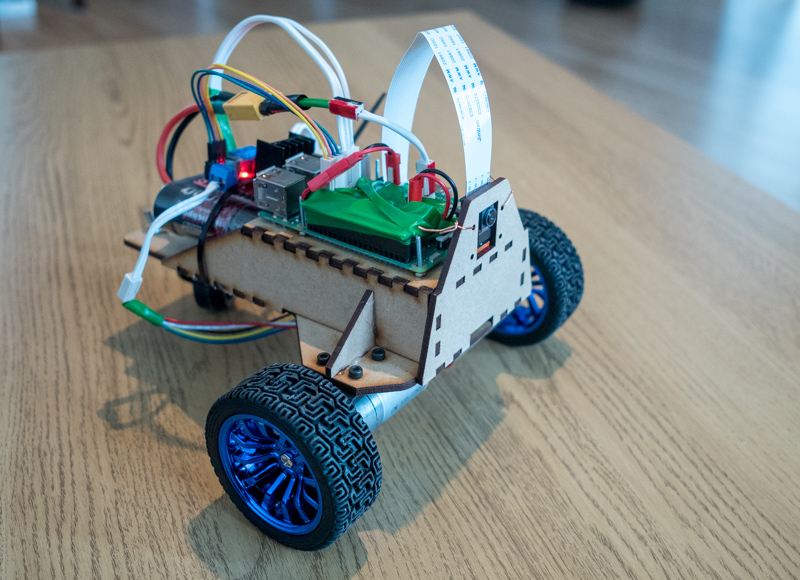
Create your very own wireless RC car with camera! The streaming video can be viewed in a browser on any device on the same network, it is controlled by using the arrow keys on the keyboard.
Bill of materials¶
| Name | Price USD | Comment |
|---|---|---|
| Raspberry Pi Zero WH | 18 | A full size board can also be used |
| Raspberry Pi Camera Module V2 | 33 | |
| DC 6V 210RPM Geard Motor Wheel Kit | 23 | found on eBay |
| L298N Dual H Bridge Motor Controller Board | 1.8 | found on eBay |
| DC-DC 5V 12V Step Down Module Converter 3A | 1.6 | found on eBay |
| Total | 76 |
In addition you will need a swivel wheel, M3/M2.5 bolts and nuts, cables and connectors, 12V battery and a car frame. The car frame used in the picture above was cut from 3mm MDF with a laser cutter and can be found here.
CAD files¶
Visit https://grabcad.com/library/772279
project
├── rc_car.py
├── index.html
├── electronics.py
└── static
└── keys.js
Engage eduROV¶
This example is used to control the ROV used in the eduROV project, see www.edurov.no.
import os
import time
import Pyro4
from edurov import WebMethod
from edurov.utils import detect_pi, serial_connection, send_arduino, \
receive_arduino, free_drive_space, cpu_temperature
if detect_pi():
from sense_hat import SenseHat
def valid_arduino_string(arduino_string):
if arduino_string:
if arduino_string.count(':') == 2:
try:
[float(v) for v in arduino_string.split(':')]
return True
except:
return False
return False
def arduino():
lastState = '0000'
ser = serial_connection()
# 'letter': [position, value]
config = {'w': [0, 1],
's': [0, 2],
'a': [1, 1],
'q': [1, 2],
'd': [2, 1],
'e': [2, 2]}
with Pyro4.Proxy("PYRONAME:KeyManager") as keys:
with Pyro4.Proxy("PYRONAME:ROVSyncer") as rov:
keys.set_mode(key='l', mode='toggle')
while rov.run:
dic = keys.qweasd_dict
states = [0, 0, 0, 0]
for key in config:
if dic[key]:
states[config[key][0]] = config[key][1]
states[3] = int(keys.state('l'))
state = ''.join([str(n) for n in states])
if state != lastState:
lastState = state
if ser:
send_arduino(msg=state, serial_connection=ser)
else:
print(state)
if ser:
arduino_string = receive_arduino(serial_connection=ser)
if valid_arduino_string(arduino_string):
v1, v2, v3 = arduino_string.split(':')
rov.sensor = {
'tempWater': float(v1),
'pressureWater': float(v2),
'batteryVoltage': float(v3)
}
def senser():
sense = SenseHat()
with Pyro4.Proxy("PYRONAME:ROVSyncer") as rov:
while rov.run:
orientation = sense.get_orientation()
rov.sensor = {'temp': sense.get_temperature(),
'pressure': sense.get_pressure() / 10,
'humidity': sense.get_humidity(),
'pitch': orientation['pitch'],
'roll': orientation['roll'] + 180,
'yaw': orientation['yaw']}
def system_monitor():
with Pyro4.Proxy("PYRONAME:ROVSyncer") as rov:
while rov.run:
rov.sensor = {'free_space': free_drive_space(),
'cpu_temp': cpu_temperature()}
time.sleep(10)
def main(video_resolution='1024x768', fps=30, server_port=8000, debug=False):
web_method = WebMethod(
index_file=os.path.join(os.path.dirname(__file__), 'index.html'),
video_resolution=video_resolution,
fps=fps,
server_port=server_port,
debug=debug,
runtime_functions=[arduino, senser, system_monitor]
)
web_method.serve()
if __name__ == '__main__':
main()
<html>
<head>
<title>eduROV</title>
<script src="./static/dynamic.js"></script>
<script src="./static/general.js"></script>
<script src="./static/keys.js"></script>
<link rel="shortcut icon" href="favicon.ico" type="image/x-icon">
<link rel="icon" href="favicon.ico" type="image/x-icon">
<link rel="stylesheet" type="text/css" href="./static/style.css">
<link rel="stylesheet" type="text/css" href="./static/bootstrap.css">
</head>
<body onload="set_size()">
<div class="grid-container">
<div class="d-none d-md-block side-panel " style="display:none;">
<div class="card bg-light cinema">
<h5 class="card-header">Sensors</h5>
<div class="card-body">
<h5>ROV</h5>
<table class="table table-hover table-sm">
<tbody>
<tr>
<th scope="row">Temperature</th>
<td id="temp"></td>
<td>℃</td>
</tr>
<tr>
<th scope="row">Pressure</th>
<td id="pressure"></td>
<td>kPa</td>
</tr>
<tr>
<th scope="row">Humidity</th>
<td id="humidity"></td>
<td>%</td>
</tr>
<tr>
<th scope="row">Pitch</th>
<td id="pitch"></td>
<td>°</td>
</tr>
<tr>
<th scope="row">Roll</th>
<td id="roll"></td>
<td>°</td>
</tr>
<tr>
<th scope="row">Yaw</th>
<td id="yaw"></td>
<td>°</td>
</tr>
</tbody>
</table>
<h5>Water</h5>
<table class="table table-sm">
<tbody>
<tr>
<th scope="row">Temperature</th>
<td id="tempWater"></td>
<td>℃</td>
</tr>
<tr>
<th scope="row">Pressure</th>
<td id="pressureWater"></td>
<td>kPa</td>
</tr>
</tbody>
</table>
</div>
</div>
<div class="card bg-light cinema">
<h5 class="card-header">System</h5>
<div class="card-body">
<table class="table table-sm">
<tbody class="table-borderless">
<tr id="voltageTr">
<th scope="row">Battery</th>
<td id="batteryVoltage"></td>
<td>V</td>
</tr>
<tr id="diskTr">
<th scope="row">Disk space</th>
<td id="free_space"></td>
<td>MB</td>
</tr>
<tr id="cpuTr">
<th scope="row">CPU temp</th>
<td id="cpu_temp"></td>
<td>℃</td>
</tr>
</tbody>
</table>
</div>
</div>
</div>
<div class="center-panel">
<img id="image" src="stream.mjpg">
<img class="rollOverlay" id="rollOverlay" src="./static/roll.png">
</div>
<div class="d-none d-md-block side-panel">
<div class="card bg-light cinema">
<h5 class="card-header">Options</h5>
<div class="card-body">
<button type="button" onclick="toggle_armed()" id="armBtn"
class="btn btn-outline-success btn-sm btn-block"
title="Use this to arm the robot">
Arm
</button>
<button type="button" onclick="rotate_image()"
class="btn btn-outline-primary btn-sm btn-block"
title="Will rotate the video 180 degrees">
Flip video
</button>
<button type="button" onclick="toggle_roll()" id="rollBtn"
class="btn btn-outline-primary btn-sm btn-block active"
title="Toggle the roll indicator on/off">
Roll
</button>
<button type="button" onclick="toggle_cinema()"
class="btn btn-outline-primary btn-sm btn-block"
title="Toggle cinema mode which hides everything except video">
Cinema
</button>
<button type="button" onclick="set_update_frequency()"
class="btn btn-outline-primary btn-sm btn-block"
title="Changes the sensor update frequency to desired value">
Sensor frequency
</button>
<button type="button" onclick="toggle_light()" id="lightBtn"
class="btn btn-outline-warning btn-sm btn-block"
title="Toggle the light on the ROV on/off">Light
</button>
<button type="button" onclick="stop_rov()"
class="btn btn-outline-danger btn-sm btn-block"
title="Stops the ROV, this page will stop working">
Shutdown
</button>
</div>
</div>
<div class="card bg-light cinema">
<h5 class="card-header">Hotkeys</h5>
<div class="card-body">
<table class="table table-sm">
<tbody>
<tr>
<td><b>F11</b></td>
<td>Fullscreen</td>
</tr>
<tr>
<td><b>L</b></td>
<td>Lights</td>
</tr>
<tr>
<td><b>C</b></td>
<td>Cinema</td>
</tr>
<tr>
<td><b>ENTER</b></td>
<td>Arm</td>
</tr>
</tbody>
</table>
</div>
</div>
</div>
</div>
</body>
</html>
project
├── entry.py
├── start.py
├── index.html
└── static
├── keys.js
├── general.js
├── dynamic.js
├── roll.png
├── bootstrap.css
└── style.css